

www.revista-fabricacion.com
16
'24
Written on Modified on
Módulos esbeltos de rotación basculante para piezas de gran tamaño
Microaccionamientos de CC que añaden dinamismo a la manipulación.

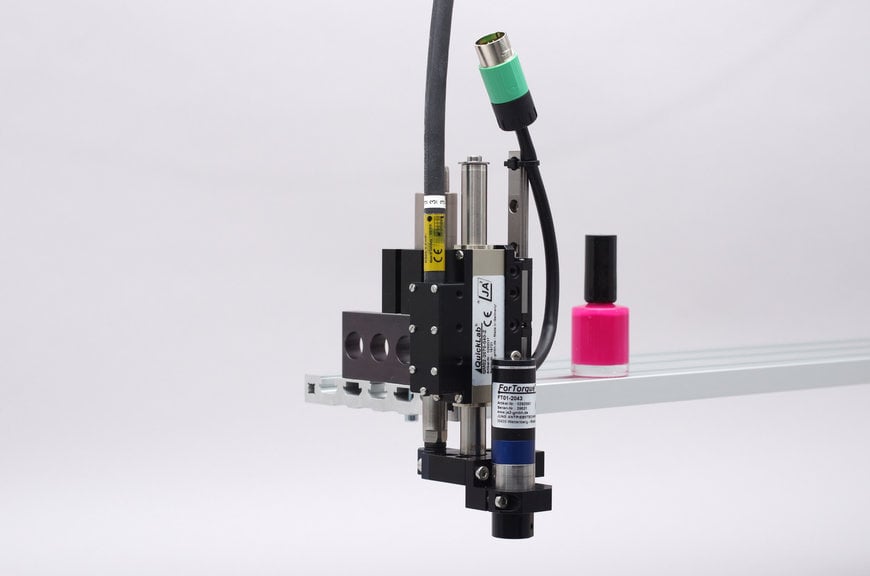
Estas unidades esbeltas de rotación infinita están indicadas para la rotación muy dinámica de piezas de gran tamaño y sujeciones excéntricas, así como para tecnologías de roscado y bobinado. (Autor: JA²)
Los accionamientos en miniatura y los microaccionamientos se pueden encontrar prácticamente en todo tipo de tecnologías de automatización y sus aplicaciones son igual de variadas: desde la tecnología médica y la automatización de laboratorios hasta la fabricación de maquinaria en general y la intralogística, pasando por las aplicaciones aeroespaciales. En todas ellas, los sistemas de accionamiento de pequeño tamaño desempeñan su función de asegurar que las soluciones de automatización correspondientes funcionen con unos niveles óptimos de seguridad, fiabilidad y rentabilidad del proceso. Esto también es válido para las aplicaciones de manipulación. En módulos esbeltos de rotación basculante y con un par elevado, estos accionamientos garantizan que incluso las piezas grandes se muevan con precisión, tanto si se trata de roscadoras de alta velocidad como de sistemas de rotación automática para manipulación, ensamblaje y comprobación.
Quienes busquen una solución eficiente que ocupe poco espacio y destinada a las secuencias de movimiento que suelen caracterizar a la tecnología de manipulación y ensamblaje, como giro, basculación, roscado, enrollado o bobinado, pueden estar interesados en los módulos de rotación basculante de la serie ForTorque del especialista en cinemática JA² (Jung Antriebstechnik u. Automation, ver recuadro) con sede en Wettenberg (Alemania). Esto se debe a que las unidades esbeltas de rotación infinita (Figura 1) son ideales para la rotación muy dinámica de piezas grandes con una inercia elevada y sujeciones excéntricas, así como para tecnología de roscado y bobinado.
Giro, basculación, roscado, bobinado
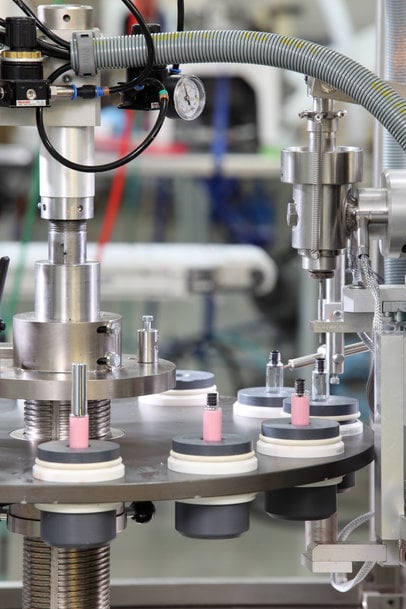
Una aplicación común de los módulos de rotación basculante en miniatura es, por ejemplo, al roscado de tapones en pequeños envases de productos cosméticos o farmacéuticos en pequeños espacios dentro de líneas de envasado totalmente automatizadas. Los módulos también son apropiados cuando las sujeciones o las piezas han de bascular, p.ej. al ensamblar o separar productos. Se han diseñado como un sistema modular en seis tamaños distintos los diámetros disponibles son de 16, 20, 25, 35, 40 y 45 mm, y cubren pares máximos y continuos de 0,3 y 0,14 Nm a 4,0 y 2,6 Nm, respectivamente. Las inercias de la carga pueden estar entre 2,0 y 200 kgcm². Esto proporciona la solución más adecuada para el movimiento y el posicionamiento angular exacto en una gran variedad de tareas de manipulación y ensamblaje.
Para reducir la carga en el eje de salida o en los cabezales reductores en el caso de que haya altos momentos externos de inercia, la placa de salida de los cuatro modelos más grandes tiene un rodamiento extremadamente rígido formado por dos rodamientos de sección fina. Además, el módulo de rotación basculante de 40 mm de diámetro puede incorporar asimismo una junta giratoria para neumática o vacío (Figura 2), p.ej., para suministrar aire comprimido a una sujeción neumática. Los especialistas en cinemática han llevado el concepto modular aún más allá: una posibilidad interesante consiste en combinar las unidades giratorias de alta velocidad con ejes lineales, p.ej., de la serie QuickLab (Figura 3). Se suministran asimismo placas de adaptación como accesorios. Como resultado se obtienen sistemas compactos de elevación-rotación o bien de elevación-basculación conectados a sistemas de manipulación de cinco ejes.
Excelente dinámica y precisión
"Los accionamientos son la parte principal de nuestro sistema de automatización modular y los requisitos que se le exigen son muy elevados", explica Wilhelm Jung (Figura 4), Director Gerente de JA². "Los motores deben funcionar de manera muy dinámica para que se puedan controlar con precisión y tengan las dimensiones adecuadas”. En el caso de los modelos ForTorque, por ejemplo, los motores de CC sin escobillas de las series B y BX4 de FAULHABER (ver recuadro) demostraron ser convincentes (Figura 5). Estos motores, basados en una tecnología de dos y cuatro polos, son muy compactos. Las versiones utilizadas de la serie B con diámetros de 16, 20 y 35 mm tienen una longitud de tan solo 28, 36 y 68 mm, respectivamente, pero proporcionar pares continuos de hasta 168 mN en el caso de la versión más grande. El caso de la serie BX4 es similar: "Aquí utilizamos motores con 22 mm o 32 mm de diámetro y pares continuos de 18 y 53 mNm, respectivamente", informe Wilhelm Jung.
Los motores se utilizan en los ForTorques a velocidades de hasta 8000 rpm. Los diferentes cabezales reductores, incluidos los de tipo planetario sin contrapresión de FAULHABER, proporcionan reducción al engranaje. En definitiva, la tecnología del cabezal del reductor, con su velocidad máxima de entrada, determina el límite para la velocidad máxima del motor. "Entonces seleccionamos la relación de reducción ratio dependiendo de la aplicación", continúa Wilhelm Jung. "De este modo podemos establecer hasta qué punto se reduce el momento externo de inercia al cuadrado por el cuadrado de la reducción. Entonces el motor se puede regular de forma precisa sin verse afectado por la palanca. Al seleccionar los cabezales reductores prestamos especial atención a la eficiencia de los cabezales: cuanto mejor es la eficiencia, mayor es la precisión con la que se puede determinar el par aplicado a la salida del cabezal a partir de la corriente del motor. Esto es primordial, sobre todo en el caso de aplicaciones de roscado en las que sea necesario roscar piezas delicadas de plástico con un par determinado".
Tecnología de un solo cable para un control sin fallos
Todos los módulos de rotación basculante están conectados y controlados mediante un conector de bayoneta estándar, una tecnología de un solo cable y un controlador de movimiento. No obstante, en los sistemas de automatización el cuadro de distribución suele estar a cierta distancia del accionamiento. "Entre el motor y el controlador en el cuadro de distribución por separado puede haber 10, 20 o más metro", señala Wilhelm Jung. Por tanto, hay un cable especial blindado que transfiere la alimentación del motor y la señal del sensor de posición entre el motor y el controlador hasta 30 m sin interferencias. El cable está sujeto y protegido frente a tirones, se puede enchufar y está diseñado para utilizarlo con portacables, es decir, para uso móvil. Además, gracias a los juegos de cables preensamblados, la tecnología de un solo cable simplifica la instalación.
Con los controladores de movimiento, el usuario puede escoger porque los motores utilizados con compatibles con diferentes controladores. "También ofrecemos controladores de movimiento de FAULHABER", añade Wilhelm Jung. Al fin y al cabo, ambas empresas han disfrutado de una exitosa colaboración durante muchos años. En los ejes lineales QuickLab antes citados, por ejemplo, se usan los accionamientos lineales de CC LM2070 y LM1247 (Figura 6). No están diseñados como los clásicos "rotores de superficie" con soportes y guías. En lugar de eso, la barra se guía dentro de una bobina autosustentable de 3 fases. "Este diseño proporciona una relación excepcionalmente buena entre fuerza lineal y corriente y una excelente dinámica. Además no hay pares de desplazamiento, logrando así que los motores lineales sean ideales para nuestro sistema modular QuickLab", concluye Wilhelm Jung.
www.faulhaber.com
