
www.revista-fabricacion.com
22
'19
Written on Modified on
Navegación de AGV: ¿qué posibilidades ofrece?
Existen varias tecnologías disponibles en el mercado para llevar un vehículo de guiado automático (automated guided vehicle, AGV) a su destino.
Todos los caminos llevan a Roma y no hay caminos correctos o incorrectos. Lo más importante es siempre la propia aplicación, así la cuestión es dónde y cómo utilizar un determinado AGV.
Hay diferentes procesos y tecnologías para dirigir un AGV del punto A al punto B. Las diversas posibilidades van desde la navegación por contorno (navegación natural) hasta el radar láser, el guiado óptico o inductivo y la navegación sobre trama.
La tecnología preferible depende sobre todo de la aplicación.
El precio del propio AGV también se sirve como referencia: el coste de la tecnología de navegación no debería ser superior al 5% del precio del AGV. Por ejemplo, para un AGV de 10.000 euros, la navegación por contorno y el radar láser quedan fuera ya que su coste se sitúa por encima del umbral de 500 euros.
Otro criterio decisivo para una u otra versión es si el AGV es un vehículo instalado bajo la carga o un vehículo de plataforma. El diseño de los primeros hace que resulten inadecuados, p.ej., para el radar láser, lo cual excluye este proceso con dichos AGV. Los vehículos de plataforma son aquellos sobre los cuales se coloca la carga transportada.
Pasemos a valorar las opciones de navegación con más detalle por lo que respecta a sus posibles campos de aplicación.
Navegación por contorno (navegación natural)
La navegación por contorno o navegación natural, cuyos sistemas de navegación son los más complejos técnicamente y más costosos, son inigualables en cuanto a flexibilidad y precisión. Si fuere necesario cambiar la ruta de transporte con poca antelación, la navegación por contorno permite realizarlo de forma muy sencilla y rápida pulsando un ratón en el software de alto nivel, la denominada gestión de flota. Dado que el sensor del AGV se suele instalar cerca del suelo, este tipo de navegación está indicado para camiones y tractores con elevadores automáticos, así como en vehículos instalados bajo la carga o los vehículos de plataforma descritos anteriormente. Para este tipo de navegación no hacen falta otras herramientas como reflectores o rutas ópticas o magnéticas, y tampoco marcas o códigos.
Radar láser
La navegación por medio de radar láser es similar por su flexibilidad a la navegación por contorno. Este tipo de navegación exige siempre, no obstante, añadir una conexión óptica del sensor a los reflectores. Por tanto, los sensores se deben montar a una altura suficientemente elevada en el AGV para que siempre puedan visualizar claramente los reflectores. Si se interrumpe la conexión a los reflectores, p.ej., al entrar en un pasillo rodeado de estanterías, el AGV debe conmutar a otro tipo de navegación. Esto dificulta aún más el cambio a otra sala si es necesario y limita la flexibilidad.
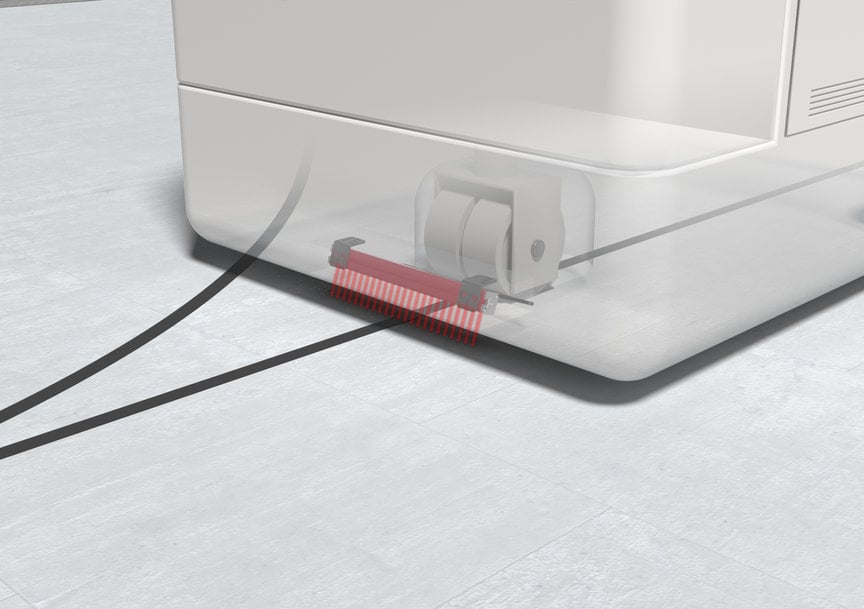
Guiado óptico e inductivo
El guiado óptico e inductivo suele ser realizado por sistemas muy sencillos que siguen una ruta previamente definida. Como resultado de ello se ven muy limitados en cuanto a flexibilidad. Por otro lado, sin embargo, representan una solución con un coste muy optimizado. Dado que el sensor del AGV se monta a una distancia muy corta del suelo, este tipo de navegación no depende del tipo de vehículo seleccionado.
Navegación sobre trama
En la navegación sobre trama, la información se incorpora a una trama que se encuentra sobre o dentro de la superficie recorrida, p.ej., códigos 2D o transpondedores. Con la ayuda de la información recogida al desplazarse sobre los puntos de la trama – con un código 2D son, p.ej., la información del código y el ángulo de lectura – el AGV puede navegar y por tanto llegar hasta un punto determinado de la trama. Este tipo de navegación está especialmente indicado para superficies limpias y superficies no sometidas a cargas pesadas.
La evaluación y recomendación del tipo de navegación adecuado solo se puede obtener junto con la función del AGV para una determinada aplicación. No obstante, en la actualidad existe una clara tendencia hacia la navegación por contorno con función de seguridad integrada.
Figura 1: Guiado óptico con el OGS 600.
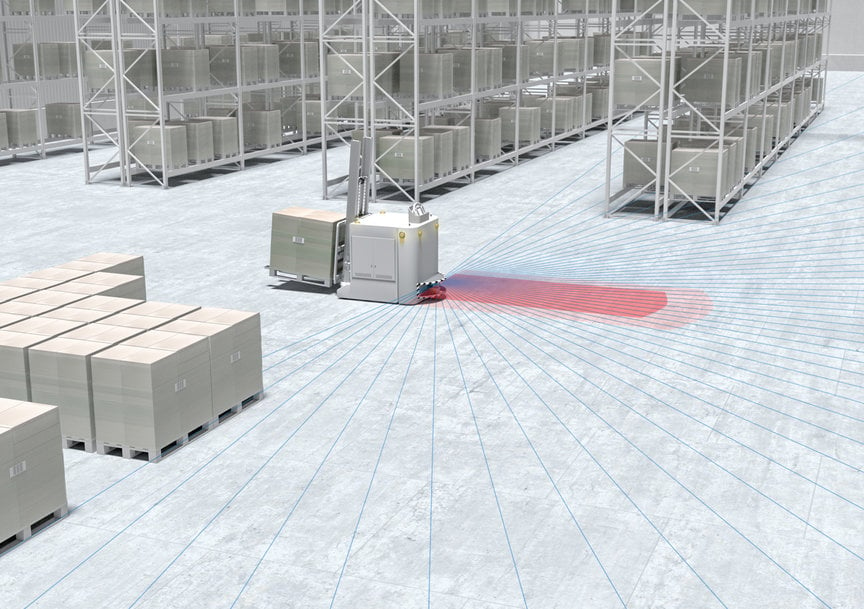
Figura 2: Monitorización de navegación y seguridad del recorrido con el escáner láser de seguridad RSL 400.

